
关于我
Developer / Designer / Explorer / Better
你好,我是阿远,是一个兴趣爱好广泛的小废物。来自于新疆,本科就读于上海,未来希望去山东发展。
13岁开始编写 EMUI、MIUI 主题,自制安卓 ROM ,并在初中时期在酷安平台入选华为主题美化大神榜(EMUI系统)。
本科就读于上海电力大学,蝉联两年全国大学生电子设计竞赛省奖(上海),即将走向社会,成为一位仪控工程师(核电方向)。平时总是喜欢学习各种前沿设备的使用,比如说软路由、PVE、VPS服务器等,当然啦,这个博客也是我的作品之一。
运营多个 Minecraft 公益服务器。
快十年的老二次元了,喜欢玩 Galgame,尤其喜欢 Clannad、命运石之门、素晴日、白色相簿2、君与彼女与彼女之恋等作品,Ciallo~(∠・ω< )⌒★
更多
最新文章
教育经历
个人网站


个人荣誉
全国大学生电子设计竞赛 省级一等奖
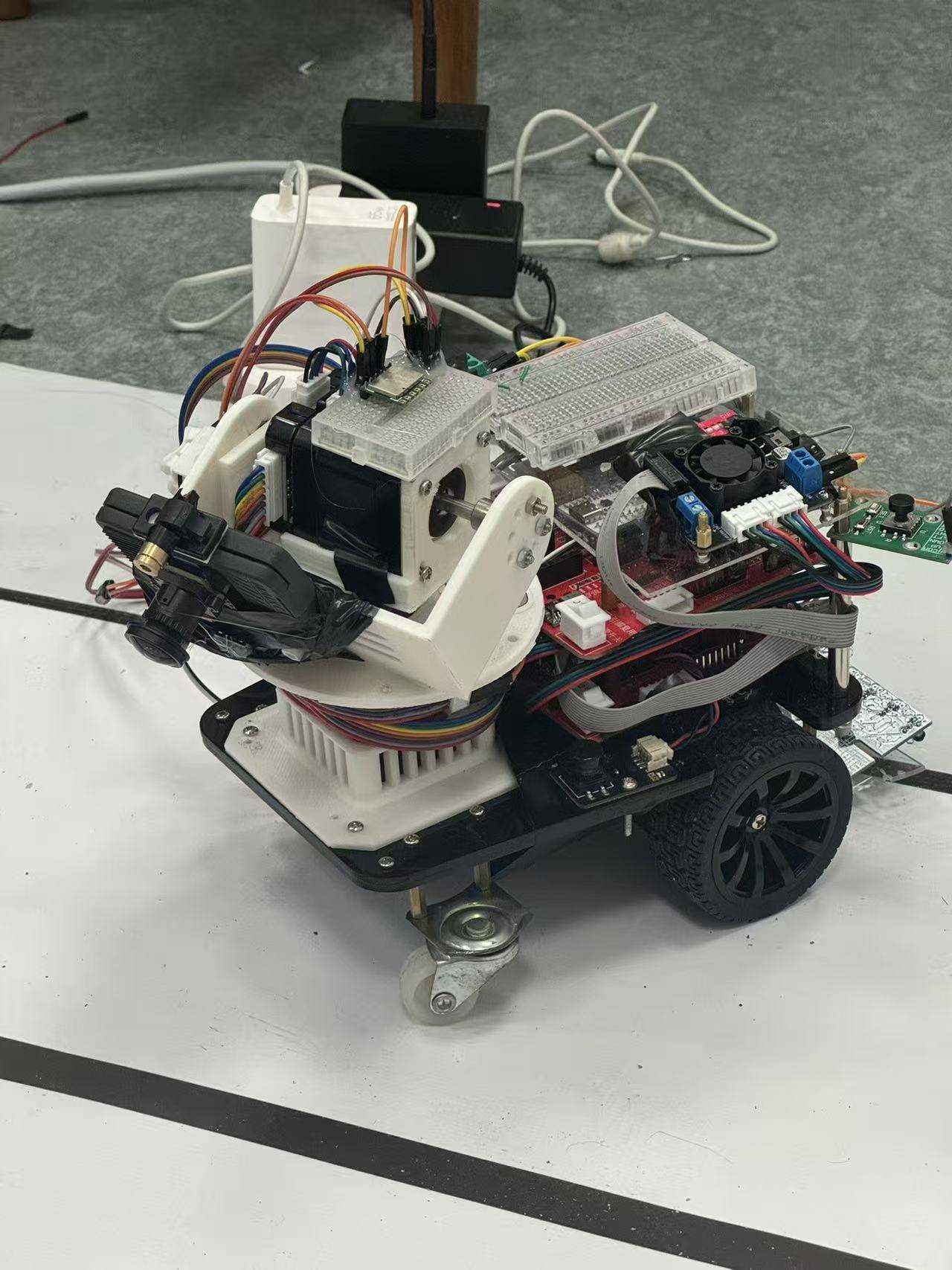
本人在竞赛中基于 MaixCAM 采用卢卡斯光流追踪、Canny 边缘检测、角点排序、多边形逼近及透视变化复合算法,结合二阶复合 PID 算法控制 TI M0G3507 主控小车完成比赛目标,最终以全省前 5%成绩获省级一等奖。
2025-10
嘉立创杯上海市大学生电子设计竞赛邀请赛 省级二等奖
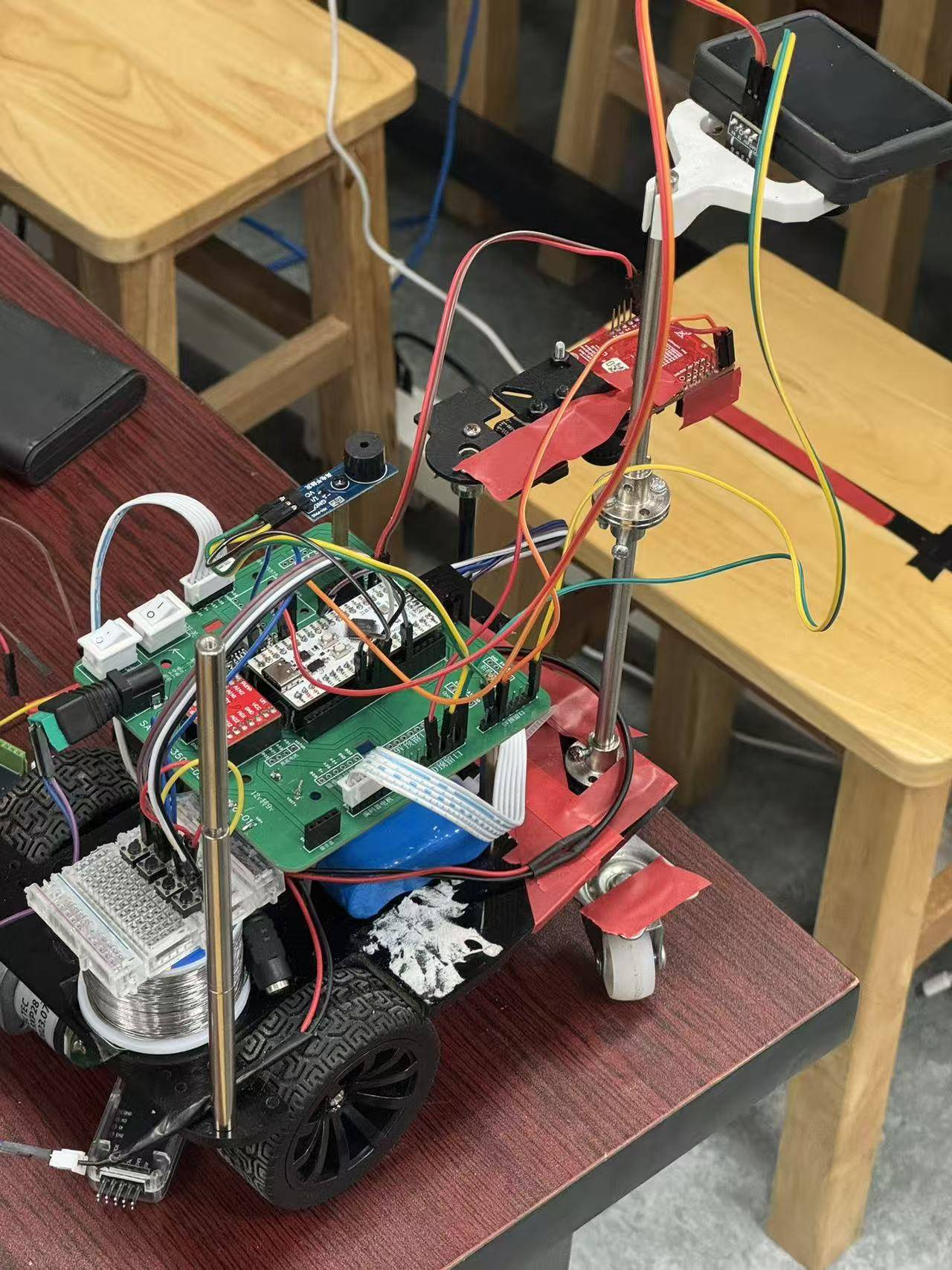
本人在竞赛中基于 MaixCAM、OpenMV,采用 Yolo v5 神经网络算法、线性回归、卡尔曼滤波、投票滤波、阈值滤波,在不同模式下选择性采用 PID、神经网络算法控制小车完成比赛目标,最终以全省前 10%成绩获省级二等奖。
2025-5
全国大学生电子设计竞赛 省级二等奖
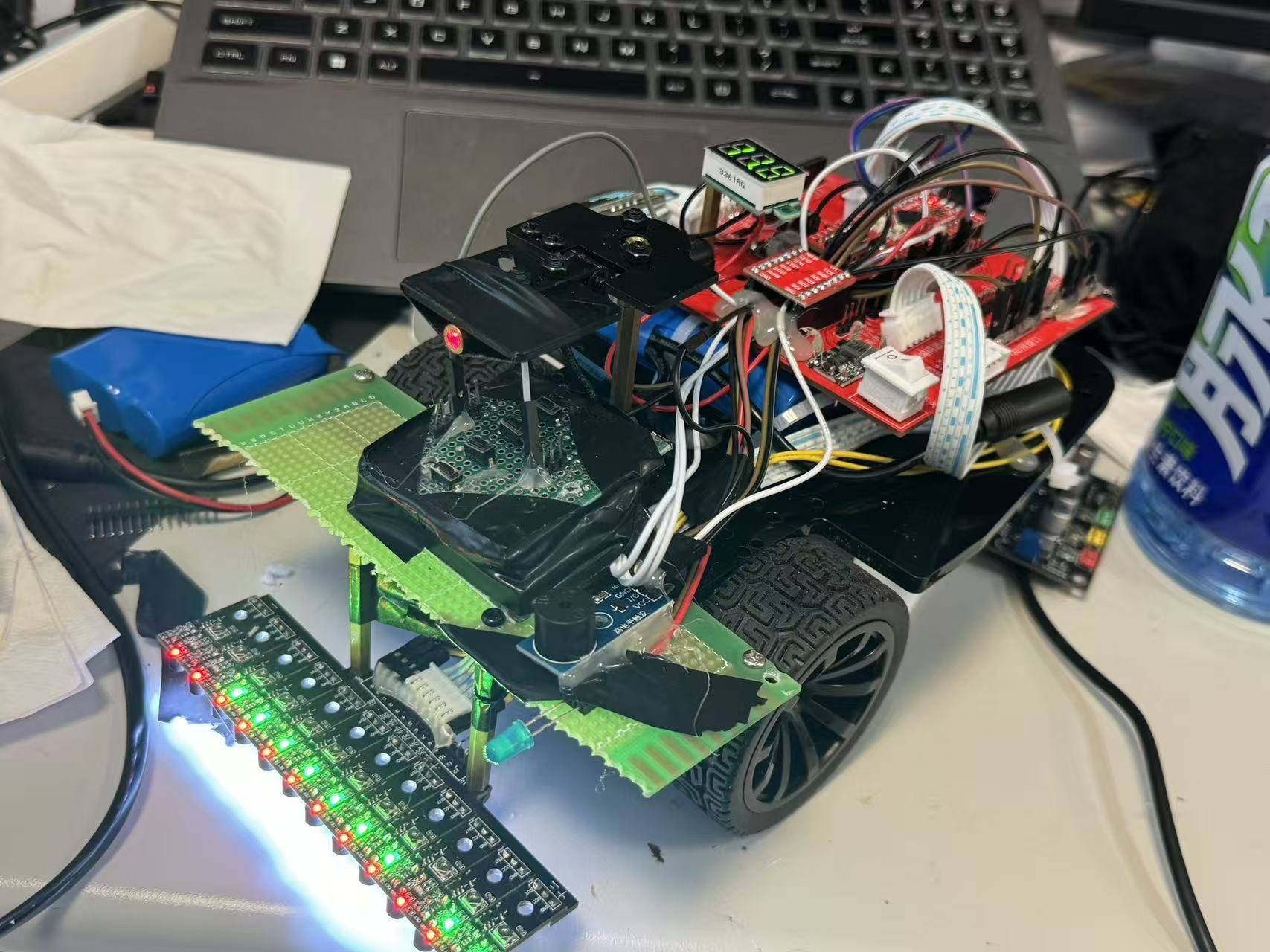
本人在竞赛中基于 TI M0G3507 主控开发 PCB 主板,实现陀螺仪、灰度传感器、蜂鸣器等模块的快速部署与适配,结合灰度-编码器电机-陀螺仪,在不同模式下的复合 PID 算法控制完成比赛目标,最终以全省前 10%成绩获省级二等奖。
2024-10
全国大学生电力创新设计竞赛 全国三等奖
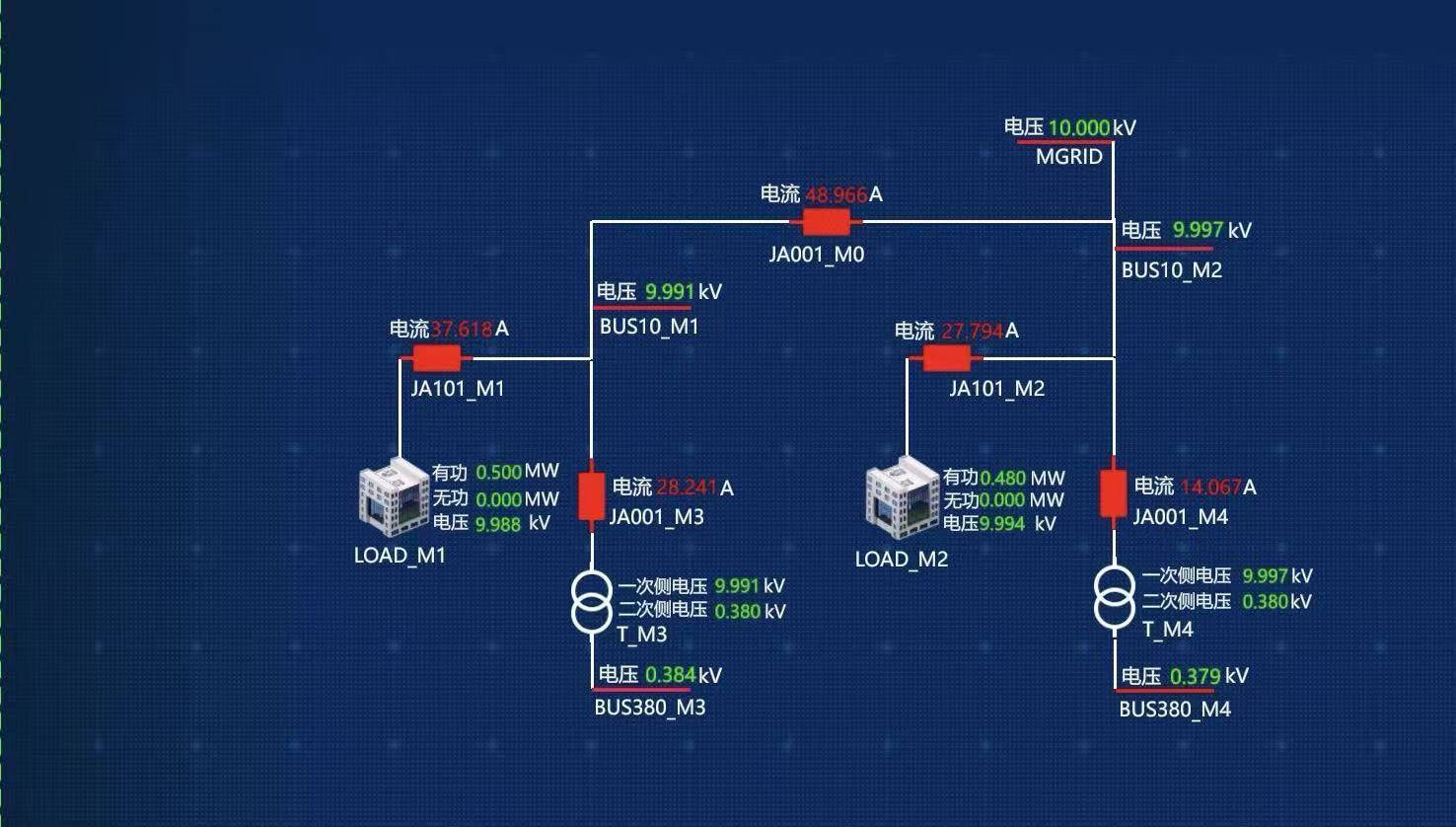
本人利用虚拟仿真技术,实现对题目要求中风、光、储的最优配置,对新能源微电网和热力系统及发电厂清洁排放工程进行规划设计和工程设计,具体模块包括有:智慧微电网能源规划设计、微电网工程设计、变电站的运行及故障处理。
2023-8
嘉立创杯上海电力大学电子设计竞赛 二等奖
使用纯数字电路和555定时器,实现三角波、方波、锯齿波、正弦波的波形输出,并满足题目中对波形相位、频率等的要求
2023-1
上海电力大学 优秀学生称号
2024-10
技能
语言
系统
爱好
关于博客
本博客基于 astro-theme-pure 开发
本人自己编写修改的部分包括但不限于:博客整体动画、统计组件、Triviality界面功能、系统优化。