总述
备赛是以完成项目为节点进行推进的,但其本质并不在于完成项目,而在于在完成项目的进程中学习到东西,而要学到什么东西的过程,则要依赖于去完成更多项目,项目指导是本篇的讨论重点。
车类题目
以下列出的功能都是重中之重
包括但不限于以下功能:
| 超声波测距、定距 | 显示器使用 |
| 陀螺仪加入PID控制 | 蜂鸣器与LED控制 |
| 灰度、红外对管循迹 | 继电器的使用 |
| 视觉特征识别(数字、图案) | 无线通讯(蓝牙或2.4G) |
| 色块追踪 | 舵机控制 |
| 编码器电机速度、位移控制 |
这些功能均不是一两句话就能讲的清楚的,用法灵活,涵盖范围较广,单论理论较难理解,因此需要在实际项目中体会。
万用板
万用板是必须要掌握和适配的核心项目,本项目贯穿整个电赛的备赛阶段,甚至到完赛阶段。发现万用板的哪个引脚存在问题,优化引脚安排,也是万用板项目中的改进手段之一。
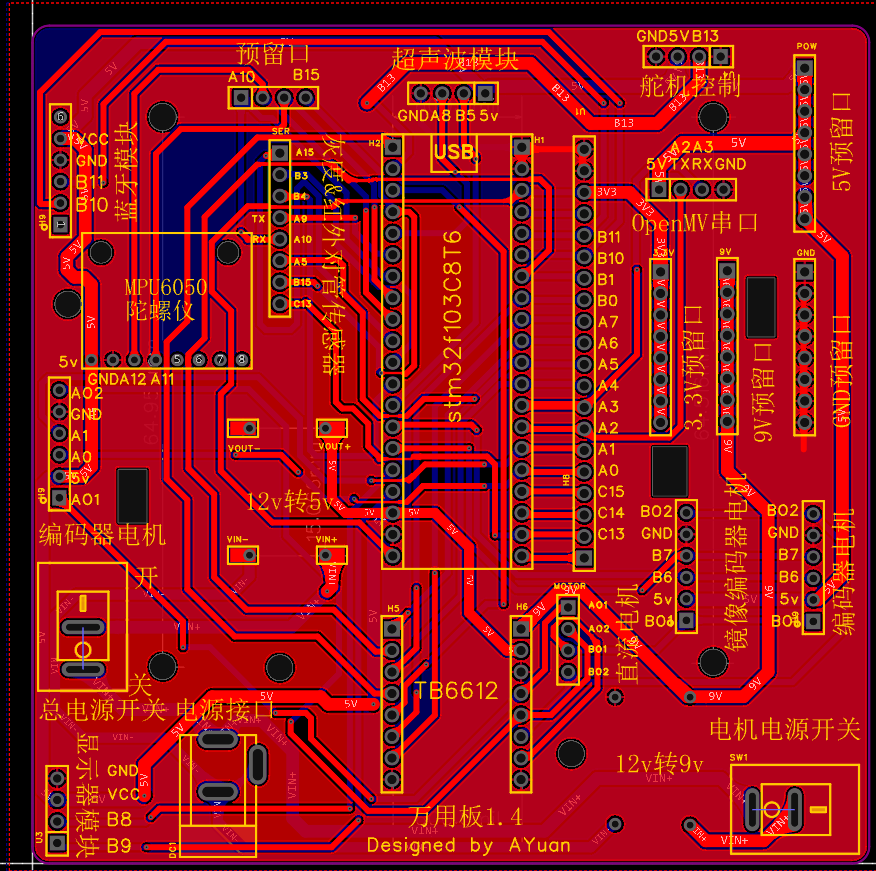
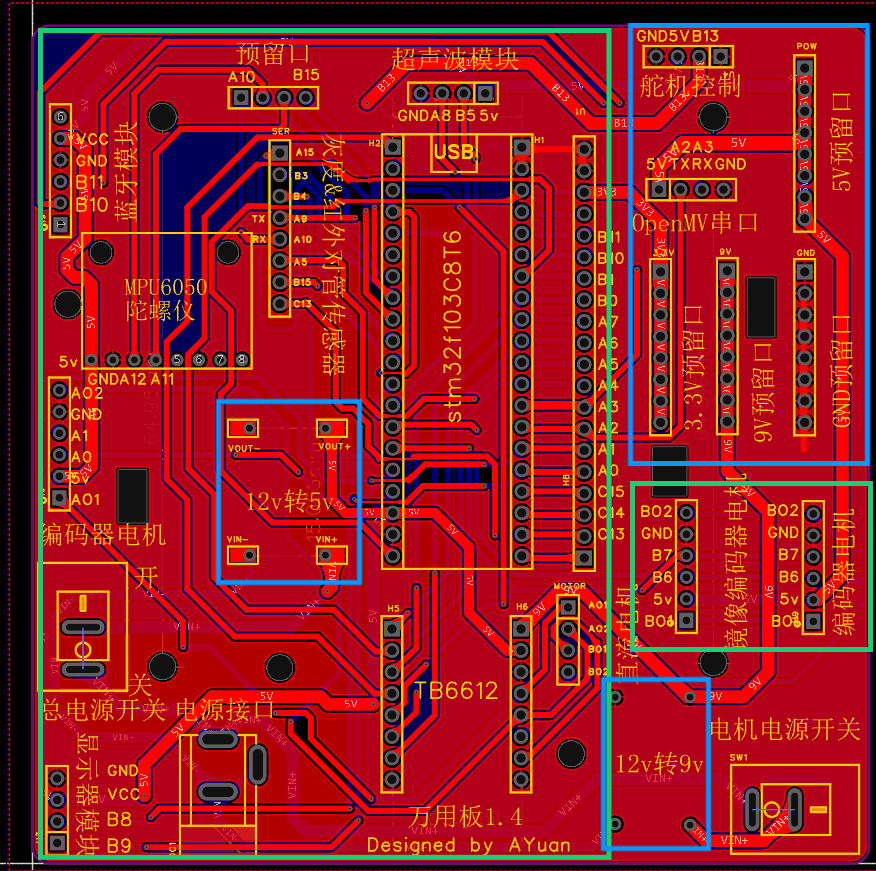
核心与基础——stm32f103c8t6版万用板
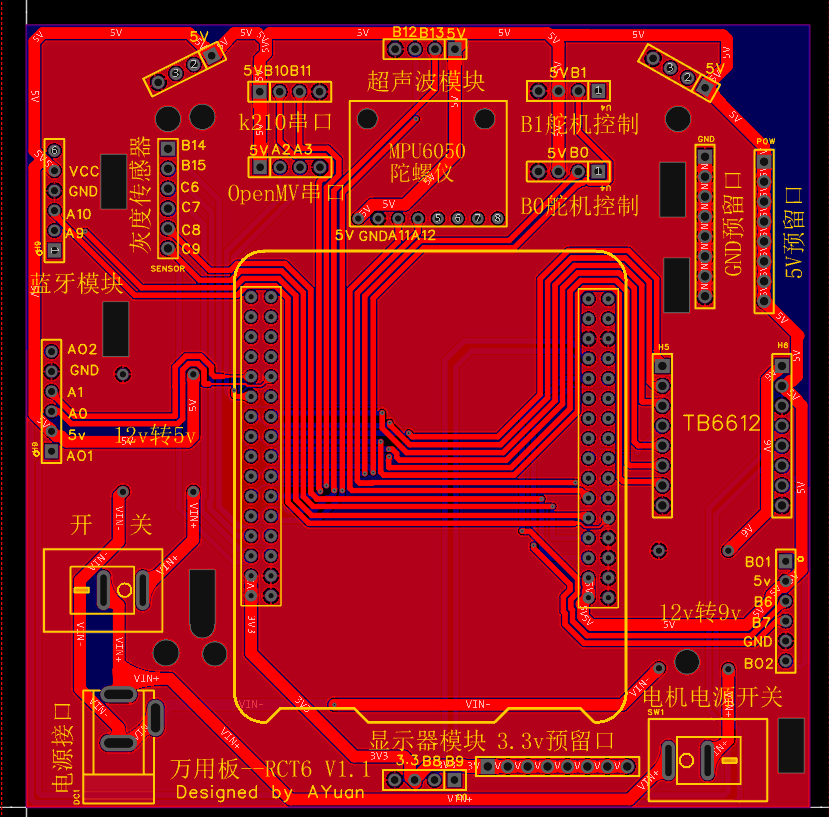
进阶与稳定——stm32f103rct6版万用板
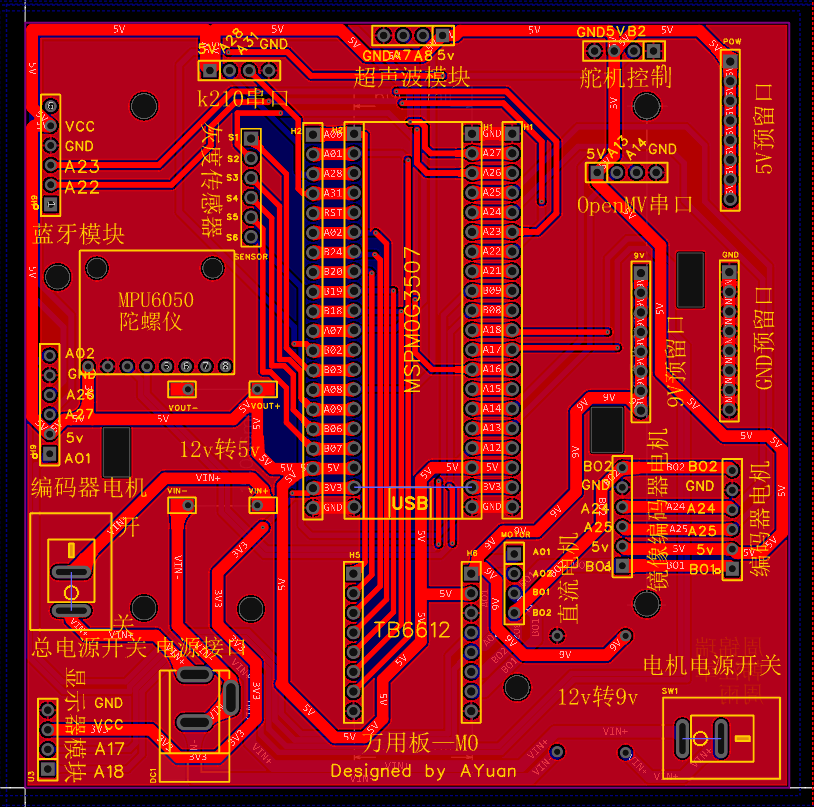
2024年参赛作品——TI M0万用板
接下来将会详细介绍stm32f103c8t6版万用板用到的零部件参数:
建议一次性购买5片PCB的用量,多买点
以下采用了zave旗舰店和优信电子科技有限公司的材料,zave可以直接开发票,优信电子科技有限公司只需要联系客服也能开发票
排针与排母的安排:绿色框代表使用排母,蓝色框代表使用排针
平衡小车(基础)
学习意义:学习编码器电机速度控制、陀螺仪与PID控制理论;学习PCB电路板设计,电源电压分配
最为基础的平衡小车只需要借助编码器与陀螺仪回传的信息,使用PID控制理论,控制小车电机实现小车平衡自立即可
这种精度的PID控制其实在日后出现的次数不多。
2021年智能送药小车(F题)(核心与基础)
学习意义:学习OPENMV的视觉巡线、K210的神经网络识别、灰度传感器巡线、灯光与蜂鸣器控制、双车通讯
可以参考b站的代码,但一定要移植到万用板上自己做出来,只跑别人的代码没有任何意义
在循迹上可以参考这个项目,万用板也是基于这个项目逐渐升级起来的:https://oshwhub.com/yuiasami/xiao-che
- 主控板:本题能够使用stm32f103c8t6实现,但c8t6的引脚过少,也可使用rct6
- 视觉:openmv不支持神经网络,k210支持
- 双车通信:基于hc-06蓝牙模块实现双车通信
- 药物识别:红外检测器,可以将压力检测转化为光敏电阻检测
- 循迹方面:六红外对管模块,红外对管,见P27,灰度传感器利用光敏二极管,在识别到颜色变化时会改变输出信号,单片机对七路信号同时采集,实现对偏差范围的测量,再将偏差传入角度环进行运算,得出两轮应当有的偏差数值,最终将输出PWM控制信号进行改变来实现转向。
- 前往病房:openmv模板匹配数字识别,或k210神经网络数字识别
- 从病房返回:基于编码器的位移记录
- 里程计算:因为20ms这个单位速度再怎么变化也不会变得很多,就可以近似看成瞬时速度
- openmv:主要实现病房标号、十字路口的识别
子项目 2022年电赛C题小车
在完成智能送药小车项目后,可以凭借已有的知识独立完成本题,本题考察的点有:双车通讯、视觉或灰度传感器巡线、特征识别与距离检测
题目链接如下:
C题参考项目:https://oshwhub.com/yanzhen6455225/2022dian-zi-she-ji-jing-sai-xing
2023 年运动目标控制与自动追踪系统(E 题)(进阶)
学习意义:学习PID、视觉与二维舵机控制
题目:https://wusiyuan.blog.csdn.net/article/details/132073292
可以参考b站的代码,但一定要移植到万用板上自己做出来,只跑别人的代码没有任何意义
本项目仅使用OPENMV的实现效果并不好,届时大家可以用我的树莓派或者自己买一个跑起来试试
2024年自动行驶小车(H题)(进阶)
学习意义:学习PID与陀螺仪控制,如何在不依赖视觉的情况下完成题目
题目链接:题目
2019年无线充电循迹小车(A题)(进阶)
学习意义:学习超级电容与无线充放电优化,写死程序的小车控制,如何在不依赖循迹模块进行循迹
题目链接:题目


参与讨论